人类和机器人越来越多地在城市、建筑物、人行道和公园等建筑环境中互动。机器人具有适应性、成本效益和可扩展性,正逐渐融入日常生活的各个方面,从制造业到医疗保健再到酒店业。
新加坡科技与设计大学(SUTD)的副教授莫汉·拉杰什·埃拉拉(Mohan Rajesh Elara)说:“确保机器人能够在建筑环境中有效地导航和操作,对它们的广泛采用和接受至关重要。”
然而,让完全自主的服务机器人在人类环境中工作仍然是一个遥远的目标。人造环境的空间限制限制了机器人的性能。在设计包含机器人的环境时,必须检查建筑环境中的机器人交互。目前用于此的方法包括实际测试和物理实验,这是昂贵的,耗时的,劳动密集型的。
为了解决这些限制,协会。Mohan教授和他的SUTD团队在题为“增强建筑环境中的机器人包容性:数字孪生辅助设计准则合规性评估”的论文中探索了一种创新方法。在这里,他们展示了一种利用数字双胞胎来建立机器人建筑环境设计指南的有用性的新方法。他们还将一些机器人原型和环境建模为数字双胞胎,以检查机器人在环境中的行为。
这项研究发表在《建筑》杂志上。
数字孪生是物理对象在其环境的虚拟版本中的虚拟复制品。Assoc表示:“数字孪生方法提供了几个关键优势,包括模拟现实世界场景的能力,实现机器人交互的虚拟测试,并在物理实施之前提供对设计准则的遵从性的见解。”莫汉教授。此外,使用数字双胞胎可以实现实时监控、危险识别和在部署前训练机器人的算法。
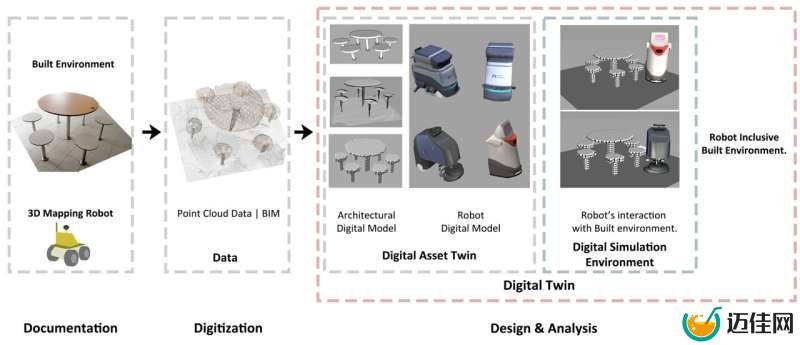
在这项研究中,协会。Mohan教授使用数字双胞胎来分析建筑环境的机器人友好性,并为机器人的部署做准备。所使用的方法分为三个阶段:文档化、数字化和设计分析。
首先,模拟环境的现场文档是必要的。它可以通过直接数据收集、激光扫描或摄影测量技术来完成。理想情况下,在建筑设计过程中,直接数据收集使用建筑信息模型(BIM) -生成和管理建筑数字表示的过程。当建筑物已经建成时,可以使用激光扫描或摄影测量技术来生成用于处理的点云数据。
第二,数字化的重点是使建成环境的数字模型适合机器人仿真软件。在这一步中,点云数据将被重建成数字空间,并用于生成建筑环境的三维(3D)模型。
最后,对数字模型进行了设计和分析。利用机器人仿真软件中的数字化环境模型,在环境中测试各种机器人的行为和相互作用。虚拟场景是根据现有的建筑环境设计准则制作的,机器人的导航、路径规划以及与周围环境的互动都会得到评估。
在一个案例研究中,Assoc。Mohan教授使用数字双胞胎在六种不同的环境中测试了四种不同的清洁机器人,这些环境都遵守无障碍设计准则。在四个机器人中,有一个完成了最多的目标,在模拟环境中表现最好。值得注意的是,机器人的包容性并不总是转化为机器人的性能效率。然而,一个包容的环境确实促进了机器人更好的可访问性,使它们能够正确地完成任务。
随着机器人越来越多地用于城市应用,如清洁、物流和建筑维护,这项研究的发现将有助于改善建筑环境的设计准则,以适应机器人。更好的设计准则将允许机器人无缝集成到以人为中心的空间中,并提高它们在各种应用中的效率。
“研究结果可以通过强调灵活性、适应性和可达性来适应机器人的互动,从而塑造未来的空间设计,”协会说。莫汉教授补充道。
未来,研究团队的目标是扩展当前的方法,并通过使用设计、人工智能和技术,自主生成所需的基础设施修改,以提高移动机器人的可访问性。Assoc。Mohan教授还希望为建设机器人友好型基础设施制定一套设计指南和建议。
更多信息:Anilkumar Ezhilarasu等人,增强建筑环境中的机器人包容性:设计指南合规性的数字双辅助评估,建筑(2024)。DOI: 10.3390/buildings14051193由新加坡科技与设计大学提供引文:设计包含机器人的环境(2024年,5月31日)检索自2024年6月3日https://techxplore.com/news/2024-05-environments-robot-inclusive.html本文档受版权保护。除为私人学习或研究目的而进行的任何公平交易外,未经书面许可,不得转载任何部分。内容仅供参考之用。